结果 总体思路是跟踪汽车完成电路所需的时间。请参阅下面的PicoScope显示屏,了解其工作原理示例:
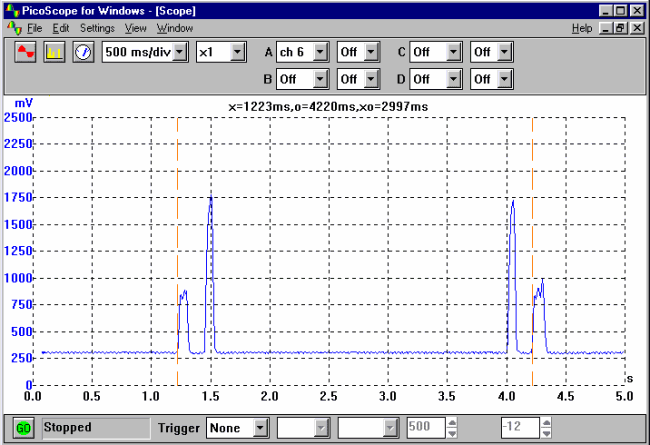
注意两个不同的峰值。较低的峰代表内侧轨道上的汽车,较大的峰代表外侧轨道上的汽车。可以看出,车内侧的车被外面的车超车。信号差异的原因是汽车离光传感器越近,光越少,因此电阻越大,电压降越大。 上面的显示屏显示外面的汽车在内侧超车。 从上面PicoScope中的屏幕截图中,可以使用以下等式计算Scalextric车辆的速度: 速度=距离/时间 内部的车可以看到需要2997毫秒才能行驶3.7米。第一阶段是识别单位,比较汽车与我们应该使用mph和小时的真实情况。 距离(km)=(3.7 / 1000)= 0.0037 时间(小时)=(2997 /(1000 * 60 * 60))= 0.0008325 现在可以计算平均速度: 速度= 0.0037 / 0.0008325 = 4.44 km / h 这里有1609米,所以: 速度= 4.44 / 1.609 = 2.759英里/小时 如果对外侧车道的汽车进行相同的计算,则其平均速度为3.698英里/小时。 上述速度似乎不是很快,但这仅仅是如何记录设备平均速度的演示。在实践中,Pico的工作人员设法在内侧车道上获得了大约8英里/小时的最高平均速度。 在此实验之后,还可以记录许多其他参数: 最大速度 每辆车的耗电量 所有读数的自动化
回到实验